Welcome to the official website of ciyi electronic technology co.,Ltd
 中文
中文












Welcome to the official website of ciyi electronic technology co.,Ltd


Time:2023-08-15 Views:1
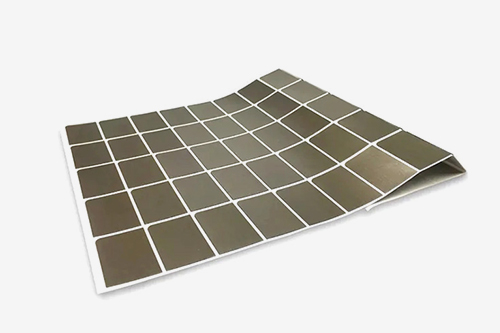
1. Permanent magnet suction cup magnetic system and yoke
When designing permanent magnet suction cups, the first step is to carefully design the magnetic circuit. A good magnetic circuit structure can allow more magnetic flux to accumulate on the working surface as much as possible, meeting the requirements of lifting weight, and minimizing the use of neodymium iron boron materials. At the same time, when designing the magnetic circuit, careful consideration should also be given to the ease with which the operator can achieve work unloading. Solve technical difficulties such as high suction force of permanent magnet suction cups and difficulty in pulling the handle.
The magnetic circuit design of a permanent magnet suction cup has two magnetic systems, which are divided into active and fixed parts. Change the state of the active magnetic system so that the working poles are in a state where the magnetic field is superimposed or reversed, and the magnetic field is cancelled out. At the same time, in the permanent magnet circuit, in order to reduce magnetic resistance and increase the magnetic flux density of key parts of the working pole surface, some soft magnetic materials are used as magnetic yokes.
2. Selection of working points for permanent magnet suction cups
Due to the variety of workpieces being lifted, the air gap distance between the working pole surface of the permanent magnet suction cup and the workpiece surface varies, and its magnetic circuit is a dynamic magnetic circuit. As shown in Figure 2, the recovery curve and working point schematic diagram of neodymium iron boron permanent magnet show that the working state of the permanent magnet changes on the recovery curve (AD). When the permanent magnet suction cup is in an open circuit state, the working point of the permanent magnet is represented by point A on the demagnetization curve; When the working surface of the permanent magnet suction cup is completely seamless with the workpiece, its working point is point D. At this point, all the magnetic flux of the permanent magnet passes through the workpiece. During the process of the permanent magnet suction cup approaching the surface of the workpiece, the working state of the permanent magnet moves from point A along the arrow to point D; On the contrary, the permanent magnet suction cup moves away from the workpiece, and the working state of the permanent magnet moves from point D along the arrow to point A. Due to the close proximity of these two curves, they can be approximately replaced by a straight line AD. OA is the working load line of the permanent magnet. Useful recovery energy (Erec) is the product of the useful magnetic flux density B and the demagnetization field strength H at the working point of a permanent magnet (Erec=B * H)

 WeChat
WeChat




